Posted for the EMC2 folks on IRC. Here is a simple test with my dial indicator.
Here is another test, which uses my “poor man’s DRO” to show the error over 3 inches.
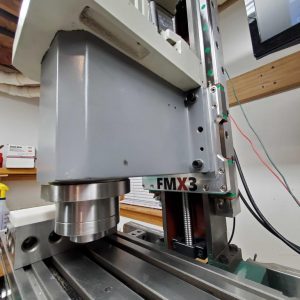
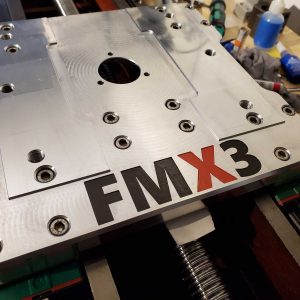
EMC2 was configured with 20320 as the scaling factor (5.08 threads per inch, since it is supposedly a 5mm screw). My motors are 200 steps/rev, drive microstepping is 10, the motors have a 10t XL pulley and the screws have a 20t XL pulley.
Here are results from the above test. Command is where I told the Y axis to move. DRO is what the calipers read out. Err is error from command to DRO. Diff to neighbor is the difference in errors between this and the previous point. Pct error is the percent error of the DRO vs command.
| Command | DRO | Err | Diff to neighbor | Pct Error |
| 0.500 | 0.506 | 0.006 | 101.20% | |
| 1.000 | 1.011 | 0.011 | 0.005 | 101.10% |
| 1.500 | 1.518 | 0.018 | 0.007 | 101.20% |
| 2.000 | 2.024 | 0.024 | 0.006 | 101.20% |
| 2.500 | 2.531 | 0.031 | 0.007 | 101.24% |
| 3.000 | 3.038 | 0.038 | 0.007 | 101.27% |
| -0.500 | -0.508 | -0.008 | 101.60% | |
| -1.000 | -1.015 | -0.015 | -0.007 | 101.50% |
| -1.500 | -1.523 | -0.023 | -0.008 | 101.53% |
| -2.000 | -2.029 | -0.029 | -0.006 | 101.45% |
| -2.500 | -2.536 | -0.036 | -0.007 | 101.44% |
| -3.000 | -3.041 | -0.041 | -0.005 | 101.37% |



I have the same issue with mine. How did you solve this problem?